移动机器人开发文档
项目简介
涉及技术栈:
- 语言层: Python3, C++
- 框架: ROS2, PyTorch, TensorRT
- 库: OpenCV, TensorRT, MQTT, RTMP
- 软件包管理: CMake
- 软件开发相关: Git, Github Actions, VSCode, Docker
项目结构
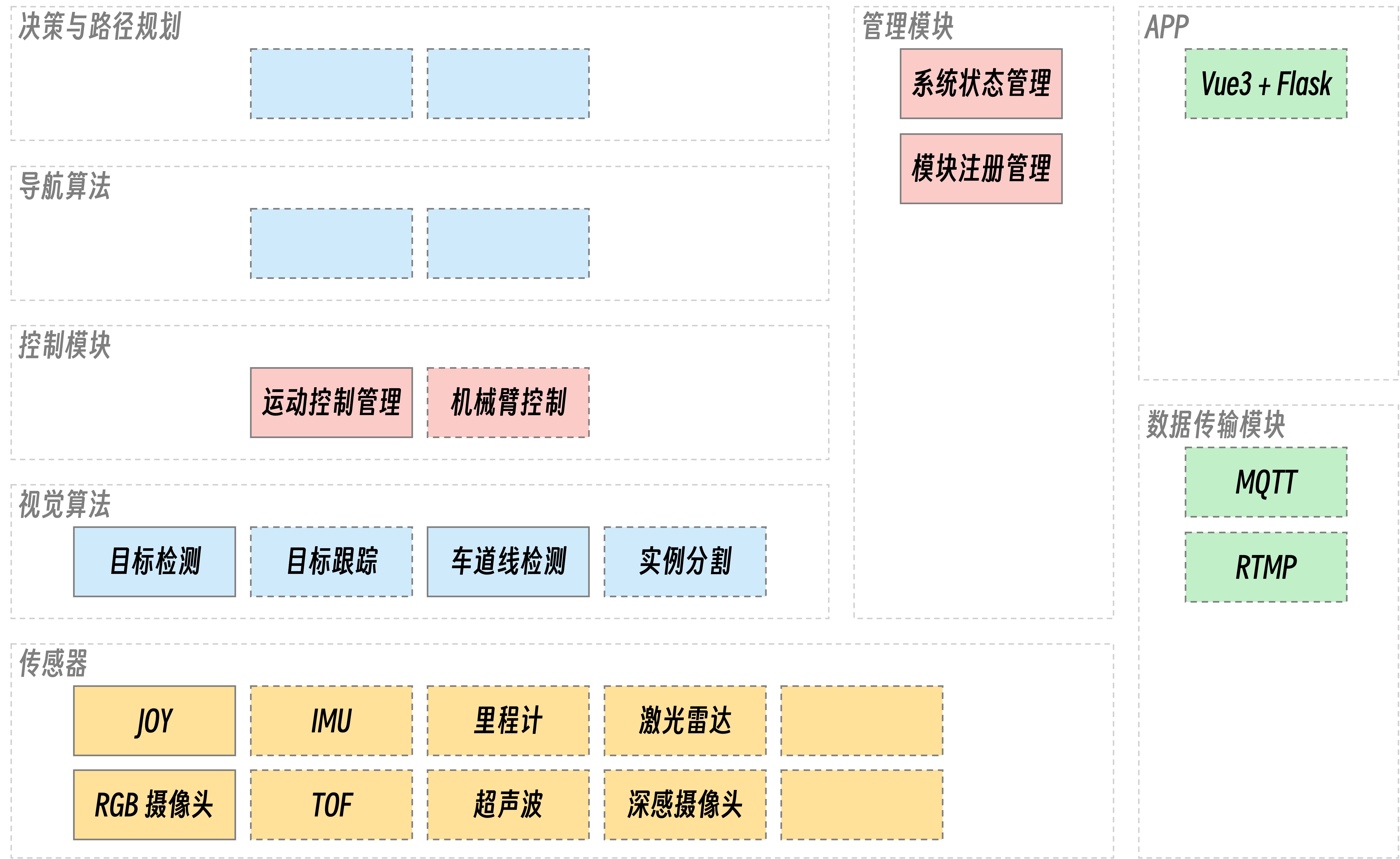
该项目的 ROS2 工作空间包括 core 和 modules
core 中包含功能包如下:
controller: 系统控制模块。包括底盘控制、机械臂控制等
- 🔄 motion_controller: 运动控制模块
- 💠 arm_controller: 机械臂控制模块
manager: 系统管理模块。包括系统状态管理、任务管理等
- launch: ROS2 启动文件
- ✅ system_manager: 系统状态管理模块
- 🔄 task_manager: 任务管理模块
base: 基础模块。包括系统中的基础功能,如基本节点、基本传感器、基本深度学习模型等,便于统一开发
- ✅ base_node: 为系统中功能节点的开发提供基础,包括节点的初始化、参数的读取、心跳包的发送等。 提供一个参考模板 node_template
modules 中包含功能包如下:
common: 通用功能模块。包括全局的系统状态码定义、通用的工具函数等
- ✅ system_state: 系统状态码、错误码的全局定义,模块的注册序号,话题、服务、参数的全局定义
- 💠 utils: 通用工具函数
interfaces: 数据接口。 包括各个模块之间的数据接口、消息结构定义
- ✅ state_interfaces: 系统状态接口和服务接口
data_transmission: 数据传输模块
sensors: 传感器模块。包括各种传感器的驱动、数据处理等
- ✅ sensor_joy: 手柄
- 🔄 sensor_uwb: UWB 定位
vision: 视觉算法模块。包括各种视觉算法的实现
- ✅ vision_lanedet: 车道线检测算法
- 🚧 vision_objdet: 目标检测算法
- 💠 vision_objtrack: 目标检测算法
navigation: 导航模块 (未开发)
app: 应用程序
- 💠 app_web: web 端控制面板 (Vue3 + flask)
功能开发流程:
💠 计划开发 → 🚧 开发中 → 🔄 测试中 → ✅ 开发完成 → ⛔️ 下线
⬆︎ ↙︎
🐛 修复中
🚀 升级中
分支管理
项目使用 git 进行版本控制,每个功能模块都应该新建一个分支进行开发,开发完成后合并到 dev 分支,dev 分支的代码经过测试后 PR 到 main 分支。功能模块命名规则:
其他子模块的开发和测试是完全可以独立的,因此,其他功能包的分支应该为 pkg-<group>__<package_name> 结构,<group> 为功能分组,<package_name> 为功能包名,中间用双下划线 __ 分隔。
例如,传感器 (sensors) 中摄像头 (camera) 的分支应该为 pkg-sensors__camera
项目文档
拥有开发权限的开发者可以查看完整文档:
yarn
yarn docs:dev
项目规范
- C++ 代码规范: Google C++ Style Guide | C++ 风格指南
- Python 代码规范: Google Python Style Guide | Python 风格指南
- Shell 代码规范: Shell Style Guide | Shell 风格指南