车道线检测深度学习方法
任务
车道线检测 (Lane Detetction) :需要将视频中出现的车道线检测出来。任务要求如下:
- 查询车道线检测的相关综述,包括
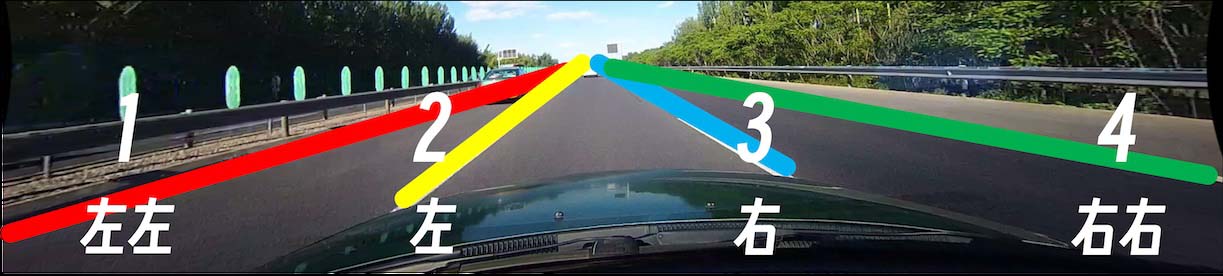
传统视觉和深度学习的方案 - 通常需要检测四条车道线:左车道、自车道、右车道。
- 需要判断双黄线、白色虚线、白色实线
- 如果车道线终止,需要判断出结束位置
- 车道线需要拟合成曲线,检测的车道线要求稳定,不能发生连续帧之间突变的情况
项目
项目是基于Ultra Fast Lane Detection
配置环境
conda create -n lanedet python=3.8 -y
conda activate lanedet
安装Pytorch依赖,需要 CUDA 11.8
pip3 install torch torchvision --index-url https://download.pytorch.org/whl/cu118
安装其他依赖
pip3 install -r requirements.txt
数据集准备
车道线检测常用的公开数据集:
- CULane
- TuSimple
- CurveLanes:华为数据集 这里我们选择 CULane 作为参考进行实验、制作自己的数据集
CULane 数据集处理和制作参考CULane文档
无论是使用 CULane 数据集还是自制数据集,都需要设置环境变量 $CULANEROOT
# ~/.bashrc
export CULANEROOT=/path/to/culane
训练
首先,修改配置文件 configs/culane.py 中重要的参数(复制一份配置文件到 temp/culane.py 修改,而不是修改原始的配置文件),包括:
data_root是 CULane 数据集路径log_path是输出的模型路径,这里默认为tmps- 训练中的超参数,比如
epoch,batch_size,steps等 resume是预训练权重,如果需要加载预训练权重,可以下载官方的预训练权重: GoogleDrive/BaiduDrive,官方的预训练权重基于 resnet18,如果希望替换成其他 backbone,需要从头训练
确认配置文件无误后启动训练脚本,需要修改脚本 temp/culane.py 内
python3 train.py temp/culane.py # 单 GPU 训练
bash scripts/train-dist.sh # 多 GPU 训练
测试
训练完成后,需要对模型进行测试,这里是对 $CULANEROOT 进行测试,如果只希望对单张图像进行测试,在下文提到。需要修改 temp/culane.py 中 test_model(待测试的模型权重文件) 和 test_work_dir(测试结果输出的目录,默认tmps),然后运行
python3 test.py temp/culane.py
单张图像测试,需要配置的内容与上述结果相同,但是需要修改文件中 test_img = "datasets/CULane/images/04980.jpg" 为指定的图像
python3 infer-torch.py temp/culane.py
部署
部署分为两种方式:
- ONNX 部署:将 pytorch 模型转化为 ONNX 模型,然后使用 ONNXRuntime 进行推理
- TensorRT 部署::将 pytorch 模型转化为 ONNX/Engine 模型,然后使用 TensorRT 进行推理
这里给出一种推理速度参考
| 推理方式 | 平均推理时间 |
|---|---|
| Pytorch | 30.9649 ms |
| ONNXRuntime | 19.9175 ms |
| TensorRT Engine | 6.5350 ms |
TensorRT 部署在 Jetson 上需要考虑系统环境,例如 Jetson Nano 系统中包含JetPack 4.6.1:
- OS: Ubuntu 18.04, Linux kernel 4.9
- TensorRT 8.2.1
- cuDNN 8.2.1
- CUDA 10.2
1. ONNX 部署
修改配置文件 temp/culane.py 中 fintune 为 pytorch 模型的权重,运行脚本后会在相同目录下生成同名的 .onnx 文件
python3 export.py temp/culane.py
得到 .onnx 文件后,修改推理脚本 infer-onnx.py 中的 onnx 模型权重 onnx_file 和待测试视频 video,然后运行如下
python3 infer-onnx.py
2. TensorRT 部署
参考 TensorRT 官方文档,部署有两种方式:
- 使用 TensorRT 推理 ONNX 模型
- 将 ONNX 转化为 Engine 模型并使用 TensorRT 推理
TensorRT官方文档 "NVIDIA Official Documentation"
安装 TensorRT 环境
必须 Ubuntu + Nvidia GPU 环境
安装 CUDA
进入CUDA 下载页面并选择需要的版本,根据电脑的配置依次选择各项,最后选择
deb(local)安装方式,将出现的命令依次复制到终端中执行。注意: JetPack 4.6.1 CUDA 10.2,但是 10.2 不支持 Ubuntu20,所以下载 CUDA 11.4
安装 cuDNN
进入cuDNN 下载页面,根据 CUDA 版本和系统架构选择对应的版本的 Tar文件,下载以下内文件:
cuDNN v8.2.1, for CUDA 10.2, for Linux (x86): 安装在 Jetson Nano 上用于转换 Engine 模型cuDNN v8.2.1, for CUDA 11.x, for Linux (x86): 安装在电脑上用于转换 Engine 模型和测试,这一步是为了在电脑上编写推理代码和测试,如果推理代码已经写好,可以不用安装cuDNN8.9.0 + CUDA 11.8 + Linux x86_64 (Tar): 最新版本
下载后得到压缩包
cudnn-${version}.tar.xz,将压缩包解压后得到同名的目录,但是8.2.1 解压后得到的是 cuda 目录,建议改名tar -xf cudnn-${version}.tar.xz安装 TensorRT
进入下载页面,点击 Download Now 的入口,选择版本的 Tar 文件下载:
下载后得到压缩包
TensorRT-${version}.tar.gz,将压缩包解压后得到同名的目录tar -xf TensorRT-${version}.tar.gz
在系统环境变量中添加 CUDA, cuDNN,TensorRT 相关的路径(修改为真实路径$xxx_HOME)。添加完成后,source ~/.bashrc 使环境变量生效
# ~/.bashrc
# ------ CUDA ------
CUDA_VERSION=11.8
export CUDA_HOME=/usr/local/cuda-${CUDA_VERSION}
export PATH=$PATH:$CUDA_HOME/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$CUDA_HOME/lib64
# ------ cuDNN 8.2.1 ------
export CUDNN_HOME=path/to/cudnn-<version>
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$CUDNN_HOME/lib64 # 新版本为 lib 目录,建议自己检查一下
# ------ TensorRT 8.2.1 ------
export TENSORRT_HOME=path/to/TensorRT-<version>
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$TENSORRT_HOME/lib
export PATH=$PATH:$TENSORRT_HOME/bin
- 安装 python相关环境
参考官方文档 "Python Package Index Installation" 安装 python 的tensorrt
# 根据 python 版本选择对应的 .whl 文件
python3 -m pip install --upgrade $TENSORRT_HOME/python/tensorrt-<version>.whl
python3 -m pip install --upgrade pycuda>=2020.1 # 已写入 requirements.txt
1. TensorRT 推理 ONNX 模型
参考官方Python API
python3 -m pip install --upgrade pip
2. TensorRT 推理 Engine 模型
参考官方文档"Exporting To ONNX From PyTorch"/"Converting ONNX To A TensorRT Engine"这种方式的部署流程是:首先将 ONNX 模型转化为 TensorRT Engine 模型,再使用 TensorRT API 推理 Engine 模型
转换过程中需要考虑到 TensorRT 支持的 ONNX 版本,具体可以参考 TensorRT(8.2.1) 源码中的 requirements.txt 文件,所以需要重新安装 ONNX 再重新转换
python3 -m pip install onnx==1.9.0 # 已写入 requirements.txt
python3 export.py temp/culane.py
在转换之前,确保有 **-INT32.onnx 模型,因为 TensorRT 支持 INT32 而不支持 INT64。如果没有,可以使用 onnxsim 工具进行转换
python3 -m onnxsim weights/culane_18.onnx weights/culane_18-sim.onnx
上述操作都可以在电脑上完成,但是如果需要在 Jetson Nano 上推理,则需要将 onnx 转换为 Engine 模型需要在 Jetson Nano 上完成,否则会出现"不匹配设备的报错",但是后面的步骤可以在电脑上测试没有问题再在 Jetson Nano 上部署。
Jetpack 自带的库在 /usr/src,因此在 Jetson Nano 的系统环境变量中添加如下内容,然后source ~/.bashrc 使环境变量生效
# ~/.bashrc
# ------ CUDA 10.2 ------
CUDA_VERSION=10.2
export CUDA_HOME=/usr/local/cuda-${CUDA_VERSION}
export PATH=$PATH:$CUDA_HOME/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$CUDA_HOME/lib64
# ------ TensorRT 8.2.1 ------
export TENSORRT_HOME=/usr/src/tensorrt
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$TENSORRT_HOME/lib
export PATH=$PATH:$TENSORRT_HOME/bin
使用官方提供的转换工具进行转换,如果 TensorRT 环境配置正确,将 **-INT32.onnx 转化为 **-INT32.engine。转换过程中可能出现的bug以及解决方案记录在"Tensor RT Engine 转换过程中的问题"中,这里提供一个输出细节参考
python3 export.py configs/culane.py
trtexec --verbose --fp16 \
--onnx=weights/culane_18-INT32.onnx \
--saveEngine=weights/culane_18-INT32.engine
--workspace=N: Set workspace size in megabytes (default = 16)--fp16: Enable fp16 precision, in addition to fp32 (default = disabled)--int8: Enable int8 precision, in addition to fp32 (default = disabled)--verbose: Use verbose logging (default = false)--exportTimes=<file>:Write the timing results in a json file (default = disabled)--exportOutput=<file>: Write the output tensors to a json file (default = disabled)--exportProfile=<file>: Write the profile information per layer in a json file (default = disabled)
实际上,NV 官方提供了
torch2trt转换工具可以直接完成PyTroch -> Engine,但是在 Jetson Nano 上部署的时候,需要在 Jetson Nano 上完成模型转换,否则在实际使用时会出现不匹配设备的报错,那么将完整的 torch 项目直接安装在 Jetson Nano 上可能会遇到很多问题,因此,这里先在电脑上完成PyTroch -> ONNX转换,然后将转换好的ONNX复制到 Jetson Nano 上使用trtexec完成ONNX -> Engine转换,可以避免在 Jetson Nano 上安装 torch 环境和项目的一些其他环境。
运行前需要安装 pycuda
python3 -m pip install pycuda>=2020.1
然后修改 deploy/infer-trtEngine.py 中的 TRT_MODEL_PATH 为 **-INT32.engine 的路径,运行
cd deploy
python3 infer-trtEngine.py
问题与解决方案
Tensor RT Engine 转换过程中的问题
报错如下
[07/13/2023-11:01:12] [E] Error[1]: [caskUtils.cpp::trtSmToCask::147] Error Code 1: Internal Error (Unsupported SM: 0x809) [07/13/2023-11:01:12] [E] Error[2]: [builder.cpp::buildSerializedNetwork::609] Error Code 2: Internal Error (Assertion enginePtr != nullptr failed. )参考 TensorRT #2727,
Unsupported SM表示该版本的 TensorRT 不支持当前的 GPU 的 SM(SM是流媒体多处理器(Streaming Multiprocessor),RTX40系列具有与以前的GPU系列不同的SM架构),需要升级 TensorRT 版本,或者选择比如RTX3080的GPU,TensorRT 8.5.1.7以上版本支持RTX40系SM报错如下
[07/14/2023-11:41:43] [TRT] [E] 6: The engine plan file is generated on an incompatible device, expecting compute 5.3 got compute 6.1, please rebuild. [07/14/2023-11:41:43] [TRT] [E] 4: [runtime.cpp::deserializeCudaEngine::50] Error Code 4: Internal Error (Engine deserialization failed.)这是由于 Engine 模型不是在 Jetson nano 上生成的,在 Jetson nano 上重新生成 Engine 模型即可
参考资料
车道线检测项目lanedet
参考 百度 Apollo 项目的车道线检测方法,使用深度学习方法进行车道线检测。
CNN + LSTM Robust-Lane-Detection